After the SuperDock M400 automatic dock was released, the most common feedback we heard was one word: fast.

The fastest response of just over 20 seconds to take off led many customers, after detailed comparison tests, to nearly the same comment:
"Fast. Really fast."
But today we do not want to talk about fast.
We want to talk about slow.
About the detours we took to put the dock on a vehicle.
CHAPTER 01
A requirement we once underestimated
A long time ago, customers started asking:
"Can you put the dock on a vehicle?"
Honestly, at first we did not think it was a real must-have. If the vehicle has already reached the site, the driver can get out, take the remote controller, and fly a route in a few minutes. Why make it complicated?
Later, a customer needed it urgently, so they simply placed a fixed dock on a pickup truck and planned to use it for a while.
We were quite confident then. The dock structure was solid enough, and the bumps of vehicle transport, in our imagination, should not be a big problem.
Reality proved that we had oversimplified it.
CHAPTER 02
The emperor's new clothes in the industry
Not long after the dock went onto the vehicle, bad news came one after another:
Gimbal damper balls kept bursting.
The drone shook badly.
Charging contacts kept wearing out.

Our first reaction was: was it an isolated case? Aging? Incorrect use?
So we replaced the damper balls with larger, higher-load versions.
They lasted a little longer, but in the end, they still burst.
Looking back now, treating symptoms without understanding the real cause is one of the biggest forms of arrogance in engineering.
Then we researched other manufacturers making vehicle-mounted docks to see how they solved it.
The result surprised us: most manufacturers had no protection at all.
For a while, we wondered if others had some clever idea that bypassed the issue.
Until one customer who had used those vehicle-mounted docks, yes, another customer who had stepped into many pits before finding StrawBerry, told us the truth:
"Those vehicle-mounted docks really have many problems. They break, get repaired, then break again. They are hard to use long term. It is just that nobody says it."
At that moment we understood: there was no black magic. Most so-called vehicle-mounted docks on the market were simply fixed docks installed on vehicles.
The industry was still developing roughly.
Coincidentally, StrawBerry's engineering team carries DNA from major automotive companies. Years later, we were developing an automotive-related product again:
If we build a vehicle-mounted dock,
it must be professional,
and it must become an industry benchmark.
CHAPTER 03
The damper balls that broke from fatigue
We decided to start with the most obvious issue: why did the damper balls burst?
Our first suspicion was that the vibration amplitude was too large and had pulled them apart. So we did tensile tests to reproduce the fault.
The result was unexpected: even under large stretching, the damper ball would pop out of the connector first, rather than burst.
So where did the cracks come from? We changed direction and ran high-frequency vibration tests.
This time, the problem appeared. The damper balls showed fatigue fracture, and the fracture location matched customer feedback closely.

The truth surfaced.
They were not pulled apart.
They were broken from fatigue.
Like bending an iron wire again and again:
one or two bends show nothing,
but after a thousand bends, it will break.
CHAPTER 04
One mechanism to lock down vibration
Finding the cause was one thing. Prescribing the cure was far harder.
Reliable vehicle-mounted docks on the market often carry smaller drones such as Air 3S or Matrice 4D, where the common method is to support the gimbal from below.
But M400 faces extremely complex conditions: many gimbal bracket types, wide rotation envelopes, varied payloads, and third-party payloads with different shapes and weights.

How can one system secure all these different things?
We considered many wild ideas: air cushions, miniature robotic arms, and countless rejected concepts.
For a while, progress stalled and the whole team got stuck.
Someone suggested: "Forget it. Let users remove the gimbal before driving and reinstall it after arrival."
But StrawBerry's engineers were not willing to compromise. If we compromised here, how would we be different from the unqualified products we disliked?
Then we changed perspective.
Since payloads vary so much, do not fix the payload itself. Start from the connection, and clamp it in a more flexible way. Better yet, make it mechanically linked: no power, no separate control, and as little extra load on the drone as possible.
After repeated tests, we finally designed a:
Cable-driven gimbal locking mechanism
A clever structure requiring no extra power:
when the door closes, it acts like a safety belt,
firmly securing the gimbal mount and damper balls;
when the door opens, it automatically releases the restraint,
restoring the damper balls' original vibration isolation.
One open-and-close action, balancing rigidity and flexibility.
CHAPTER 05
Pressing the aircraft down
The gimbal was stable, but the aircraft body still shook.
Imagine a vehicle crossing a speed bump. Even passengers may be lifted from their seats.
What about an M400 carrying a payload?
If only the landing gear is fixed from below, the body has a lot of inertia on rough mountain roads.
Over time, the connection points will deform. Longer still, structural error accumulates and the whole device becomes loose.
The drawer-style structure of SuperDock M400 gave us an opportunity:
Use the backward retraction motion to press the aircraft from above.
When the door closes, the linked top clamp
presses the aircraft down and supports the gimbal.
One motion completes two tasks.
CHAPTER 06
Using flexibility to overcome force
Next came the troublesome charging contacts.
Even if the aircraft is fixed firmly, the vehicle is moving, and the contacts inevitably experience continuous micro-friction.
Over time, this causes wear, unstable voltage, and even communication instability.
So we did two things:
01
We simplified the contacts to two, while communication uses wireless transmission.
This reduces instability from multiple contacts as much as possible.
02
We designed a floating mechanism similar to automotive suspension for the contacts.
It lets the contacts follow the drone's position, transferring vehicle pitch and road impact into a separate moving mechanism.
If vibration cannot be avoided, embrace it.
Let this mechanism absorb all bumps and impacts,
instead of forcing the contacts to take the load.
CHAPTER 07
The lead screw that could not slip, slipped
Just when we thought all problems were solved, something strange appeared: after high-frequency vibration testing, the landing platform had moved outward by a few millimeters.
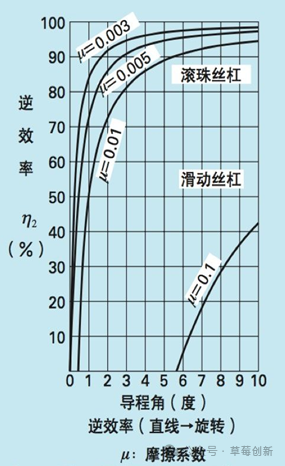
We were using a trapezoidal lead screw, and it was self-locking: with a lead angle below 5 degrees, theoretical reverse efficiency is zero. It should not slip.
Did the motor rotate during vibration? Logs said no.
Did lateral platform movement drive the screw? We fixed it further and tested again. The problem remained.
After several days of investigation, we found a small difference between theory and practice:
The common self-locking formula only holds under static conditions.
The friction coefficient μ is static friction, not dynamic friction.
Under high-frequency vibration, friction can be greatly weakened, and the self-locking condition is quietly broken.
Even if normal vehicles never reach the test bench's vibration frequency, we wanted to eliminate the risk completely.
The solution: switch to a lead screw with a smaller lead angle.

After another round of reinforced high-frequency vibration testing, the slipping disappeared completely.
In engineering, theory is only a map. The road still has to be walked.
SUMMARY
The answer emerges
The SuperDock M400 vehicle-mounted edition is the result of four optimizations working together:
| Optimization | Problem solved |
|---|---|
| Gimbal locking | Prevents high-frequency damper ball bursts |
| Body clamping | Reduces structural deformation risk |
| Floating contacts | Solves contact wear |
| True self-locking lead screw | Prevents platform drift under vibration |
From this point, using a vehicle-mounted dock feels almost the same as using a fixed dock.
No special caution, no removing the drone, no removing the gimbal. Just use it normally.
For users, all of this is invisible.
The best technology is technology you no longer feel.
EPILOGUE
About our original intention
After all these technical details, some people may think we spent so much effort solving problems customers had not even complained about.
That is true.
Customers ask for something, and we could simply satisfy that.
The final decision maker may never personally drive the pickup.
Having the driver remove the drone when not in use is not a huge issue.
Adding a note that says "remove the drone while driving" could avoid all trouble.
But if we ourselves were users, we would find such a product mediocre.
We do not want to produce industrial junk, and we do not want to build something that merely sells.
A good product should make every person who uses it feel respected.
Especially today, with AI so advanced, making a barely usable prototype is far too easy.
Things that are easy to make have never been worth being proud of.
We want to build something we can be proud of:
to put our pursuit of technology, understanding of beauty, and vision of the future into the products we design and manufacture.
We hope it has extreme performance and elegant design:
When users face the harshest environments,
and discover that we anticipated their difficulties,
that a group of people once wrestled with their situation to the end,
and gave them a complete solution,
that knowing smile from the user...
That is the ultimate romance of engineers.
This is the SuperDock M400 vehicle-mounted edition.